主页
← RSS2025 Index
RSS2025 Paper 104
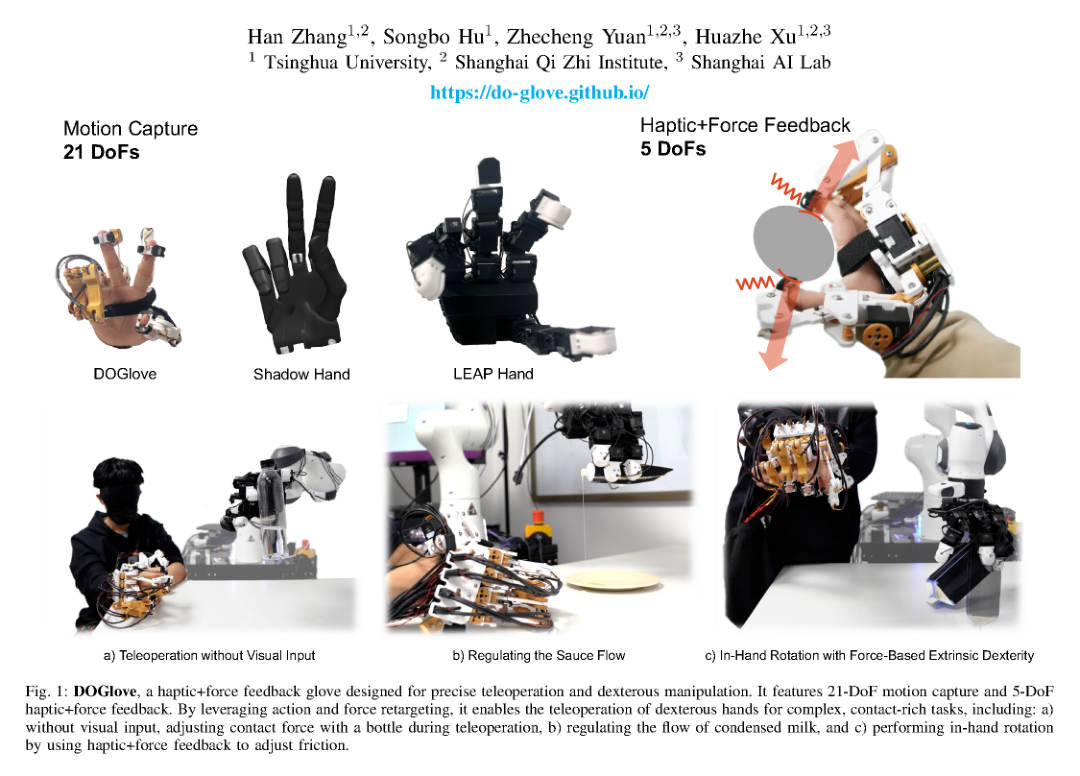
DOGlove: Dexterous Manipulation with a Low-Cost Open-Source Haptic Force Feedback Glove
Han Zhang, Songbo Hu, Zhecheng Yuan, Huazhe Xu
机器人学习
触觉
灵巧手
操作
人机交互
模仿学习
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)