主页
← RSS2025 Index
RSS2025 Paper 111
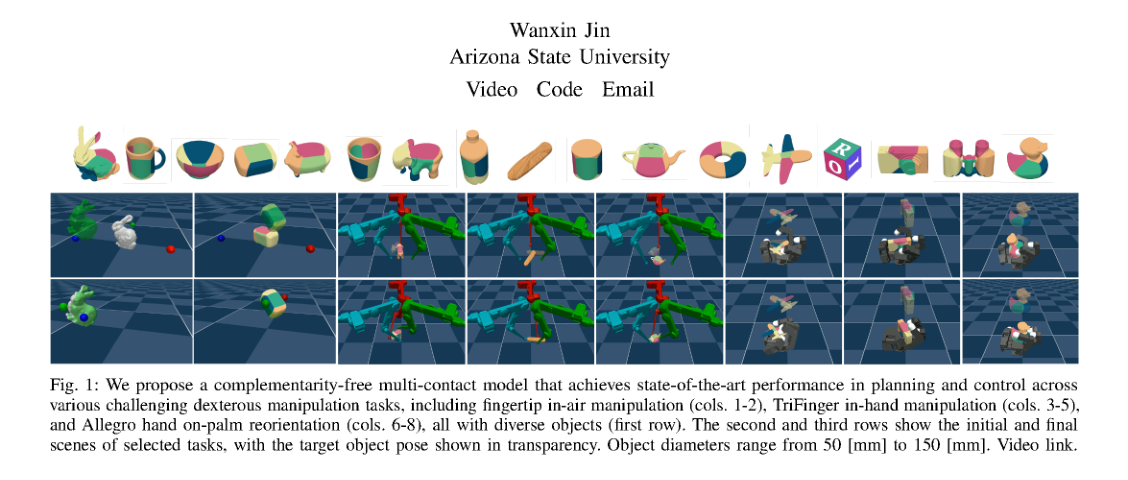
Complementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation
Wanxin Jin
机器人学习
操作
灵巧手
控制
规划
感知
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)