主页
← RSS2025 Index
RSS2025 Paper 113
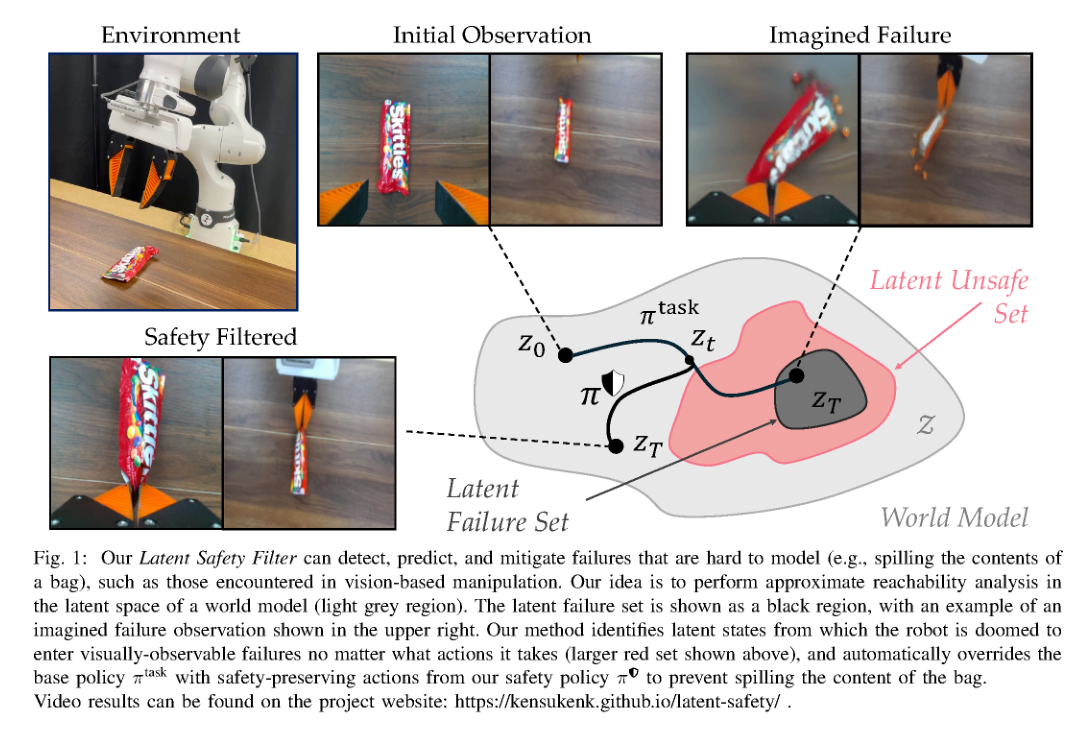
Generalizing Safety Beyond Collision-Avoidance via Latent-Space Reachability Analysis
Kensuke Nakamura, Lasse Peters, Andrea Bajcsy
机器人学习
安全
生成模型
控制
灵巧手
模仿学习
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)