主页
← RSS2025 Index
RSS2025 Paper 114
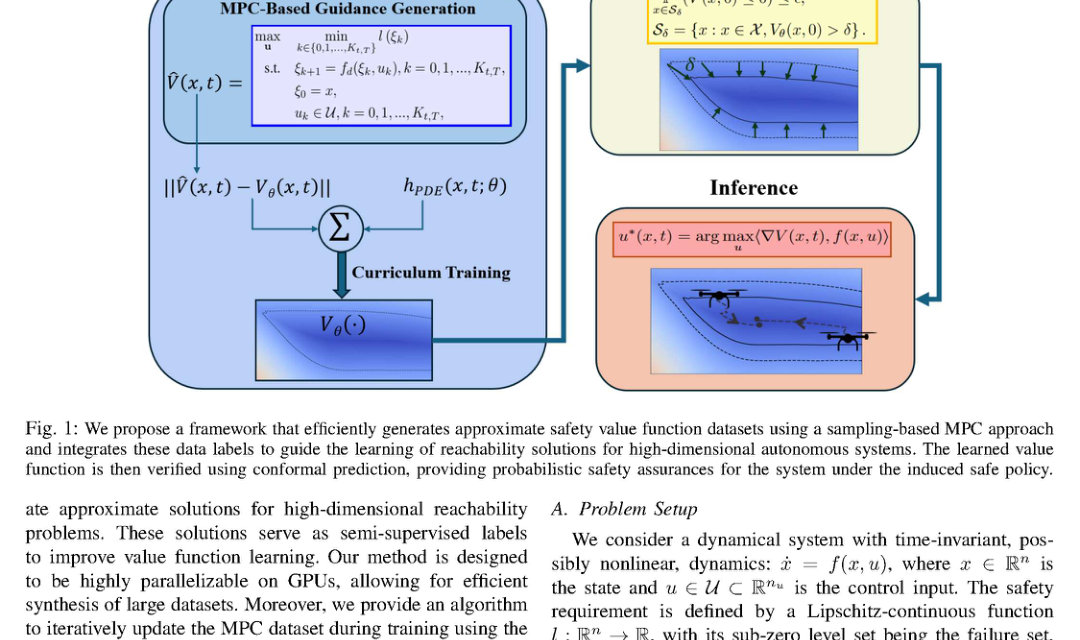
Bridging Model Predictive Control and Deep Learning for Scalable Reachability Analysis
Zeyuan Feng, Le Qiu, Somil Bansal
控制
规划
安全
机器人学习
感知
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)