主页
← RSS2025 Index
RSS2025 Paper 116
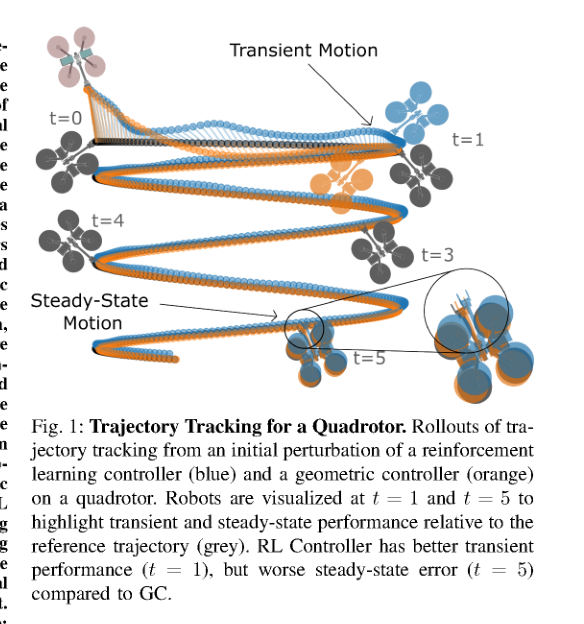
Leveling the Playing Field: Carefully Comparing Classical and Learned Controllers for Quadrotor Trajectory Tracking
Pratik Kunapuli, Jake Welde, Dinesh Jayaraman, Vijay Kumar
控制
强化学习
机器人学习
自动驾驶
数据
触觉
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)