主页
← RSS2025 Index
RSS2025 Paper 146
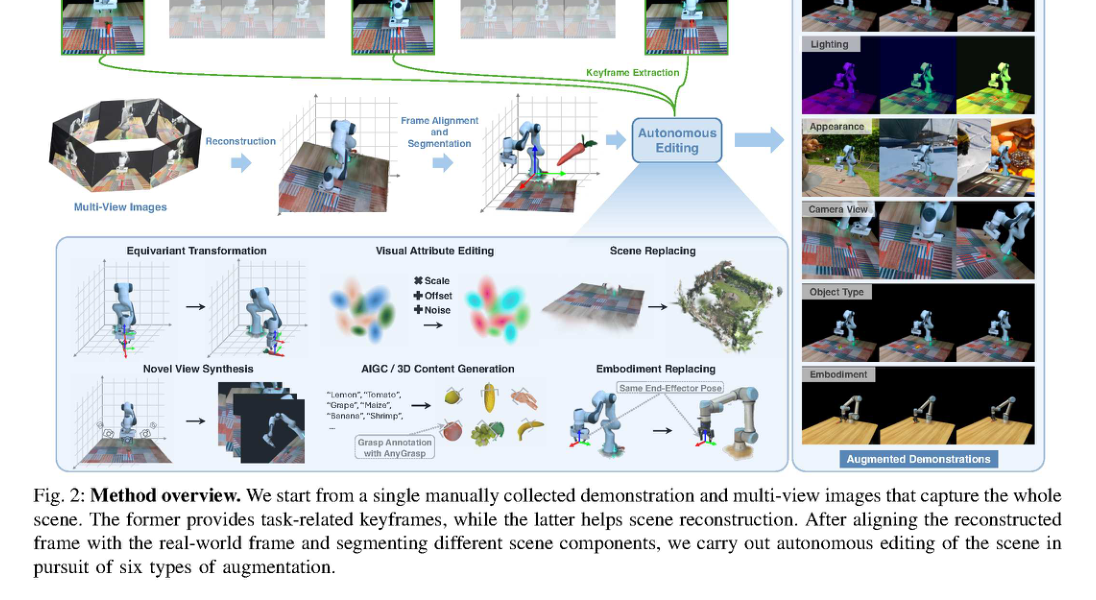
Novel Demonstration Generation with Gaussian Splatting Enables Robust One-Shot Manipulation
Sizhe Yang, Wenye Yu, Jia Zeng, Jun Lv, Kerui Ren, Cewu Lu, Dahua Lin, Jiangmiao Pang
机器人学习
感知
数据
模仿学习
操作
生成模型
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)