主页
← RSS2025 Index
RSS2025 Paper 153
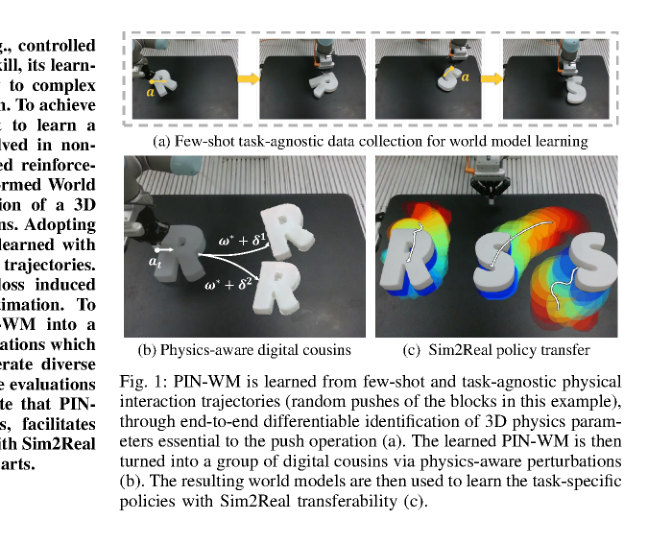
PIN-WM: Learning Physics-INformed World Models for Non-Prehensile Manipulation
Wenxuan Li, Hang Zhao, Zhiyuan Yu, Yu Du, Qin Zou, Ruizhen Hu, Kai Xu
机器人学习
操作
生成模型
仿真到现实
感知
控制
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)