主页
← RSS2025 Index
RSS2025 Paper 154
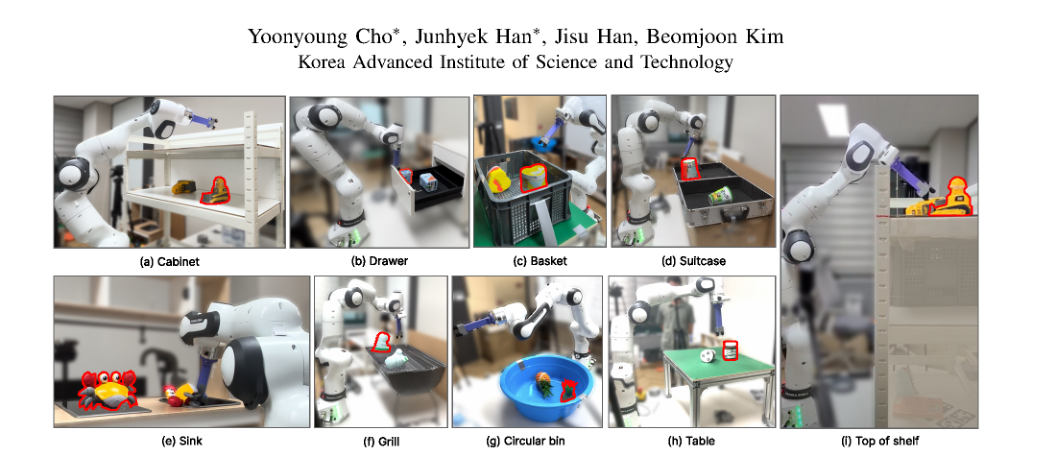
Hierarchical and Modular Network on Non-prehensile Manipulation in General Environments
Yoonyoung Cho, Junhyek Han, Jisu Han, Beomjoon Kim
机器人学习
操作
安全
强化学习
灵巧手
基础模型
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)