主页
← RSS2025 Index
RSS2025 Paper 158
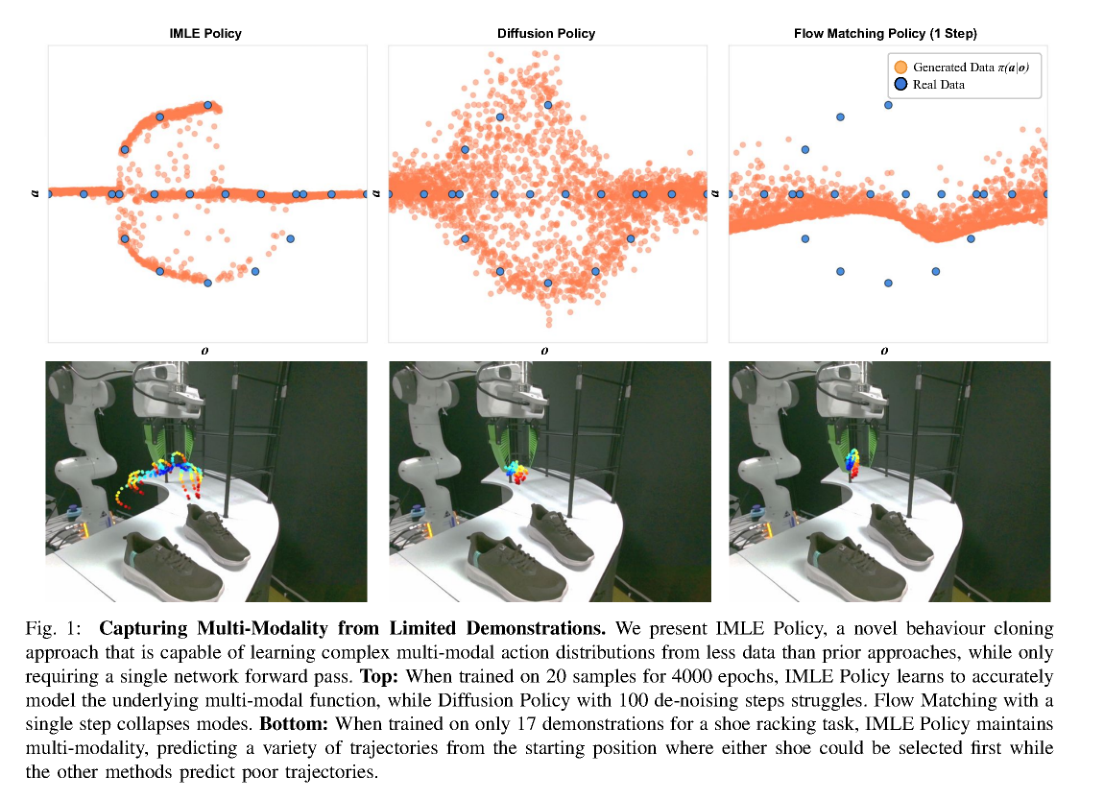
IMLE Policy: Fast and Sample Efficient Visuomotor Policy Learning via Implicit Maximum Likelihood Estimation
Krishan Rana, Robert Lee, David Pershouse, Niko Suenderhauf
数据
生成模型
机器人学习
模仿学习
扩散策略
安全
新标签打开 AlphaXiv
新标签打开 arXiv
新标签打开 Project
AlphaXiv 中文概览(可滚动查看)