精读笔记
Problem Setting
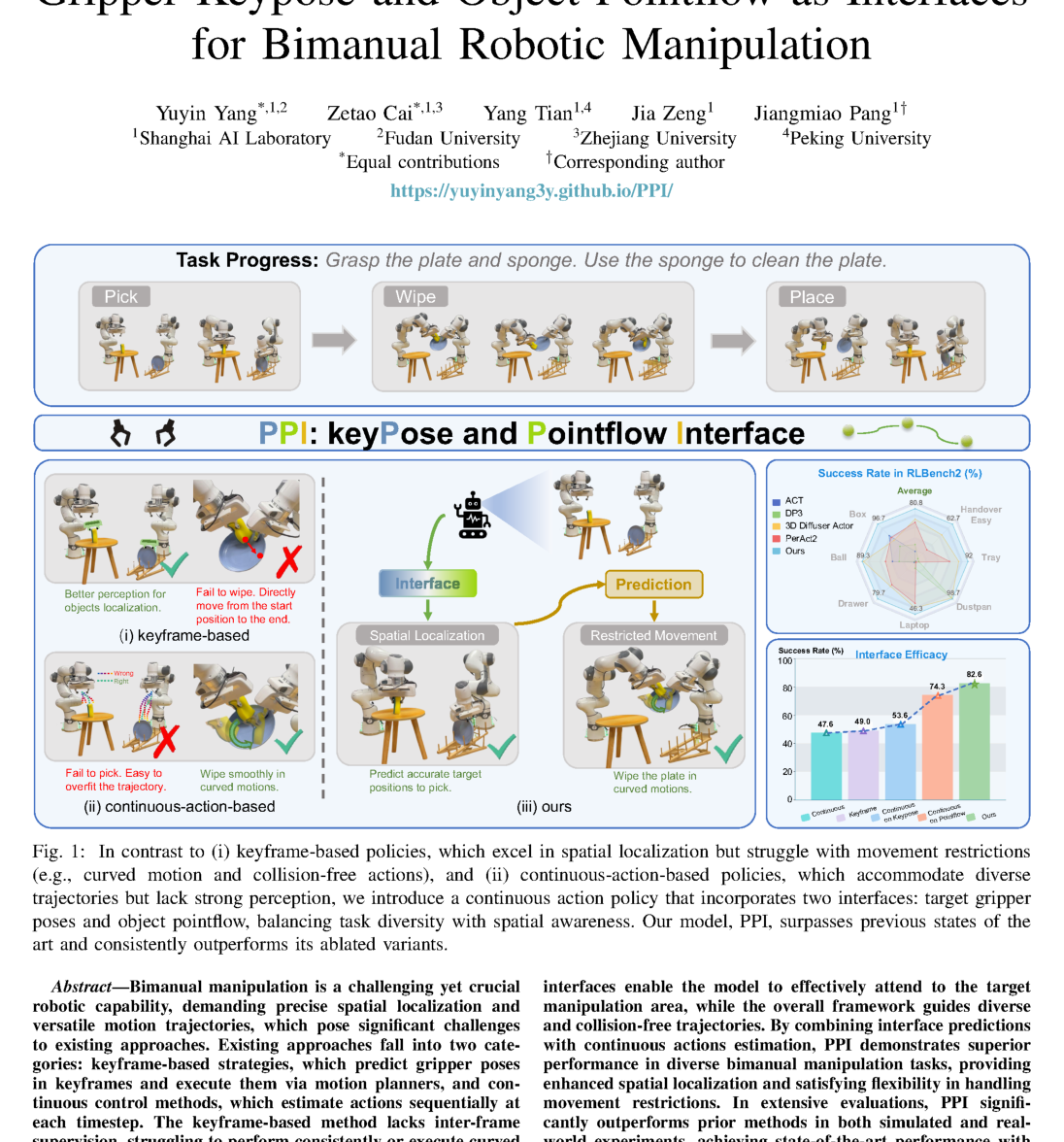
这篇论文实际在解决的是:在双臂接触式操作中,如何让策略既知道交互发生在哪个精确空间位置,又能生成不只是直线的、受约束的连续轨迹。难点不在于单步动作预测,而在于任务往往同时要求高定位精度、双臂协调和中间轨迹形状的满足;纯 keyframe 会把这些压成少数关键点,纯连续 BC 会把它们压成轨迹拟合。真正的矛盾是空间理解和运动灵活性之间的冲突。
Motivation
作者的动机其实很朴素:现有路线分别把 perception 和 flexibility 牺牲掉了一个。keyframe 路线的缺陷是稀疏监督太强地依赖 planner,遇到曲线、受限、避障动作时很脆;continuous 路线的缺陷是密集监督让模型学到轨迹皮肤而不是几何本质,容易 overfit 到训练轨迹。于是他们想要的不是折中,而是把两者的优势做成一个显式接口:既保留 keyframe 的空间锚定,又保留连续控制的轨迹自由度。
Core Idea
PPI 的核心思想是把“动作生成”重新组织成一个有中间几何接口的条件生成问题,而不是直接从观测映射到控制。它先预测两个可解释的中间量:目标 gripper keypose 和 object pointflow,再让连续动作以这两个接口为条件生成。直觉上,这相当于把原本高度多模态、时间耦合的控制问题拆成“定位交互对象/区域”和“沿着什么对象运动模式执行”两个层次。这样做的价值不在于多了两个 head,而在于强制模型把空间理解压缩到可对齐的中间结构里,从而缓解纯 BC 容易学捷径、纯 keyframe 又缺少中间监督的问题。
Method
方法上最值得保留的是“接口优先于直接动作”的设计原则,而不是具体的 diffusion transformer 实现。第一,先用 3D 语义场景表征承载空间信息,这是为接口服务的感知底座;它解决的是纯视觉 token 很难稳定表达三维交互几何的问题。第二,显式预测 keypose,这是把目标区域和最终接触姿态从隐变量变成可监督对象,减少连续策略靠记忆轨迹偷懒。第三,显式预测 pointflow,这是把对象交互的局部运动模式前置,给动作生成提供形状/运动上的结构化约束。第四,再做连续动作去噪生成,把灵活性留在最后一步,而不是让模型一开始就在无结构动作空间里搜索。整体变化是:从“直接预测动作”转为“先预测可解释接口,再生成动作”。
Key Insight / Why It Works
我认为这篇工作真正有效的原因主要不是“更强的 transformer”或“更大规模训练”,而是更好的 inductive bias:它把连续动作从纯轨迹拟合,改成了受中间几何接口约束的生成。keypose 提供的是目标锚定,pointflow 提供的是局部交互的运动先验;二者共同把 policy 的搜索空间压缩到更像人类操作的区域。这里 pointflow 很可能是更核心的贡献,因为它不是简单告诉模型“去哪里”,而是告诉模型“对象局部将如何被作用”,这比 keypose 更接近操作的真实结构。相较之下,keypose 更像辅助的定位监督。另一个重要判断是:它的提升很可能主要来自 representation alignment 和 supervision densification,而不是某种新的 planning 机制。也就是说,PPI 不是学会了更强的规划,而是通过接口让连续策略更不容易学歪。
Relation To Prior Work
它最接近两条谱系:一类是 keyframe / hierarchical manipulation,比如 PerAct2、VoxAct-B、BiKC 这类方法;另一类是连续控制 / diffusion BC,比如 ACT、RDT、DP3。PPI 的新意不在于又做了一个混合框架,而在于它把“中间层”从 planner 的隐式输出,改成了可监督的接口 token。看起来像重组已有思想,但实质上有一点变化:它不是先选关键帧再补轨迹,也不是直接学轨迹,而是让中间几何结构参与动作生成。换句话说,它属于“interface-conditioned policy”这条更细的谱系,而不是传统的层次规划。
Dataset / Evaluation
评价覆盖了仿真和真实两端,这是它相对可信的地方:仿真里是多任务的双臂操作集合,真实里强调长时序、未见物体、光照变化和视觉干扰。这个设置基本能支持“接口提升了空间定位与轨迹鲁棒性”这一主张,但还不足以证明它对更开放的双臂通用操作有效。换句话说,evaluation 能证明它比常见基线更适合当前这类几何明确、接触密集的任务,但不能证明它解决了更一般的操作规划问题。
Limitation
它最大的上限在于接口假设本身:如果任务的中间状态不能被稳定表示成 gripper pose 和 pointflow,这套方法就会失效或退化成普通多任务 BC。其次,文中没有充分拆开“接口思想”和“3D 语义场景表征”的贡献,增益来源不清,可能有相当一部分只是更强的 3D 表征、更好的监督和更合适的数据覆盖。再者,它的真实世界泛化虽强,但仍是封闭任务族里的泛化,不是开放世界泛化;因此所谓 generalization 更像是对场景扰动和实例变化的鲁棒,而不是对任务结构的抽象迁移。最后,long-horizon 的能力也未必意味着真正的长期状态建模,可能只是接口把每一步的局部决策变得更稳,从而在经验上撑住了长序列。
Takeaway
- 1) 对双臂操作来说,真正重要的不是动作头更强,而是中间表示是否对齐交互几何。
- 2) pointflow 可能比 keypose 更有信息量,因为它显式编码了对象如何被作用,而不只是目标在哪里。
- 3) 这篇工作的价值更像是提出了一种更好的监督接口,而不是一种新的规划理论。
- 4) 如果未来要迁移,这个思路更适合“需要空间锚定 + 局部受限轨迹”的操作任务,而不是所有 manipulation。
一句话总结
PPI 把双臂操作从“直接学连续动作”改成“先学 keypose / pointflow 这类几何接口,再在其约束下生成动作”,本质上是在用更强的空间归纳偏置修复连续策略的感知短板。