主页
← RSS2025 Index
RSS2025 Paper 162
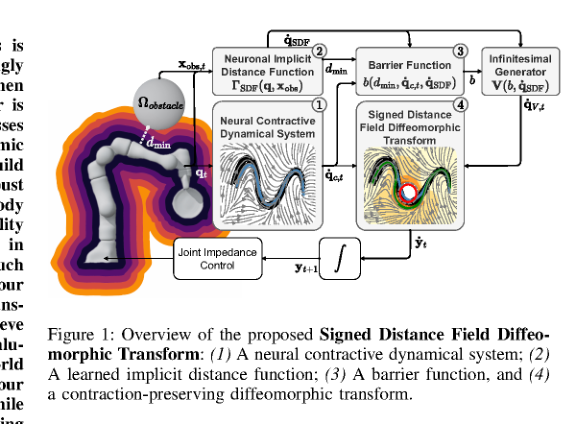
Diffeomorphic Obstacle Avoidance for Contractive Dynamical Systems via Implicit Representations
Ken-Joel Simmoteit, Philipp Schillinger, Leonel Rozo
机器人学习
控制
安全
模仿学习
数据
新标签打开 AlphaXiv
新标签打开 arXiv
AlphaXiv 中文概览(可滚动查看)